Before I get ahead of myself too much, I first want to make sure I can get SavvyCAN working for diagnostic logging/sniffing the CAN bus.
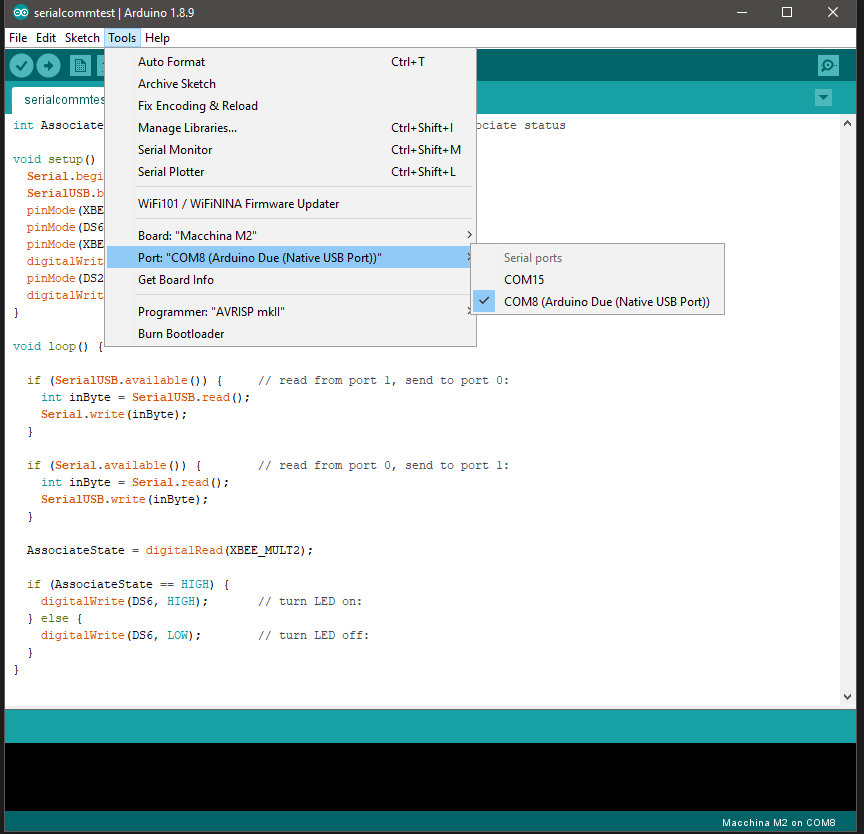
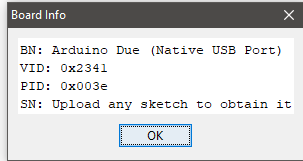
I followed the instructions given here: https://docs.macchina.cc/m2/getting-started/arduino.html down to a T and I was able to get the drivers to show up in the IDE. I ran the board info option and this is what I got:
I used M2RET (Version 345, found here: http://www.savvycan.com/) to flash my M2 and everything said successful (can’t remember if I did this before or after the Arduino setup part, probably before).
Then I went to open SavvyCAN (after closing Arduino IDE since we can’t have multiple programs open that use the same BUS) and my questions begin here, how do I know for sure the device is working if it hasn’t yet been used in a vehicle?
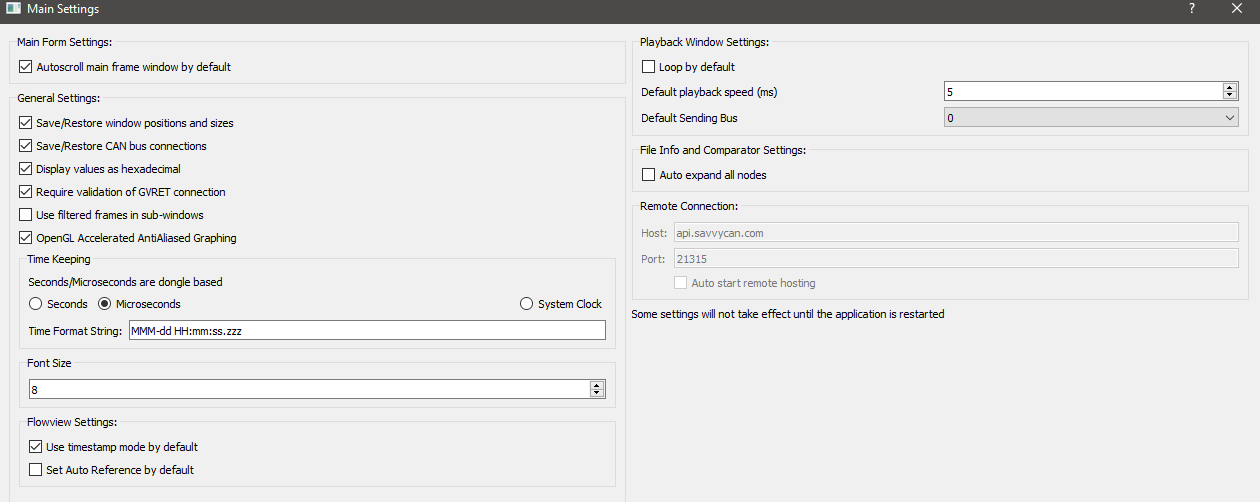
My Main Settings Page of SavvyCAN:
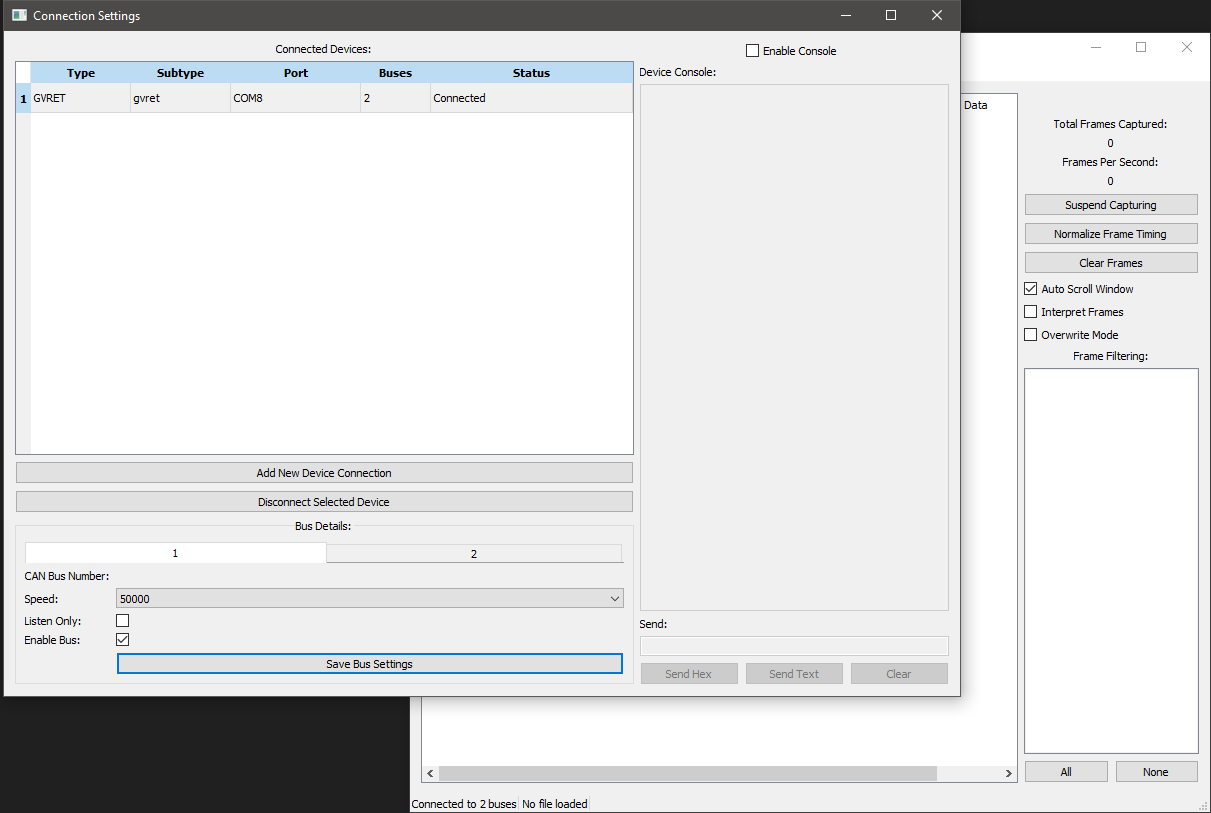
Here is the connection settings page
Does everything look good so far?
I also ran this sketch that is given on one of the tutorial pages to ensure that serial communications work (it appears it was successful):
int AssociateState = 0; // variable for reading the associate status
void setup() {
Serial.begin(9600); // Serial port for XBEE socket
SerialUSB.begin(9600); // Native USB port
pinMode(XBEE_MULT2, INPUT); // DIGI Associate PIN
pinMode(DS6, OUTPUT); // Green LED
pinMode(XBEE_RST, OUTPUT);
digitalWrite(XBEE_RST, HIGH); // Make sure RESET is HIGH
pinMode(DS2, OUTPUT);
digitalWrite(DS2, LOW); // Turns on Red LED
}
void loop() {
if (SerialUSB.available()) { // read from port 1, send to port 0:
int inByte = SerialUSB.read();
Serial.write(inByte);
}
if (Serial.available()) { // read from port 0, send to port 1:
int inByte = Serial.read();
SerialUSB.write(inByte);
}
AssociateState = digitalRead(XBEE_MULT2);
if (AssociateState == HIGH) {
digitalWrite(DS6, HIGH); // turn LED on:
} else {
digitalWrite(DS6, LOW); // turn LED off:
}
}
Now a few questions:
When I upload a sketch to the device, that is going to the SD card correct? Does M2RET flash the memory on the Arduino Due/M2 itself? In other words, uploading a sketch isn’t going to mess up the M2RET flash will it?
What do I need to do now that it appears everything is set up to start logging the CAN bus? I plugged it in once already to my OBD-II port and it just did the blink sketch that was still uploaded to it.
Is there a specific sketch I need to upload to data log? I can easily follow steps when given, but I’m still a noobie about what exactly is needed (at this point in the process anyway). I assume I need to do something to tell the M2 to log the CAN bus to a data file, but don’t see this info given anywhere that I’ve seen.
I don’t intend to use the M2 in tandem with a laptop or anything unless needed for a specific tune (not constantly in my car), but I’m not sure the M2 capable software is even at the stage where that is needed yet. In the “Car Hacker’s Handbook” they mention maybe two apps that should work, but on an info page by Macchina I found at least 3-4. How many software packages currently work for the M2? Such as SavvyCAN, but not just diagnostics, if there are any.
Thanks in advance for all of your help and guidance, I think this community has excellent potential!