I’m working on a project that requires CAN to be interfaceable with Python. I would like to use the Macchina M2 to collect ambient CAN data from vehicles. The preexisting code for my project is written in Python, so I would like to avoid using an entirely new language to begin working.
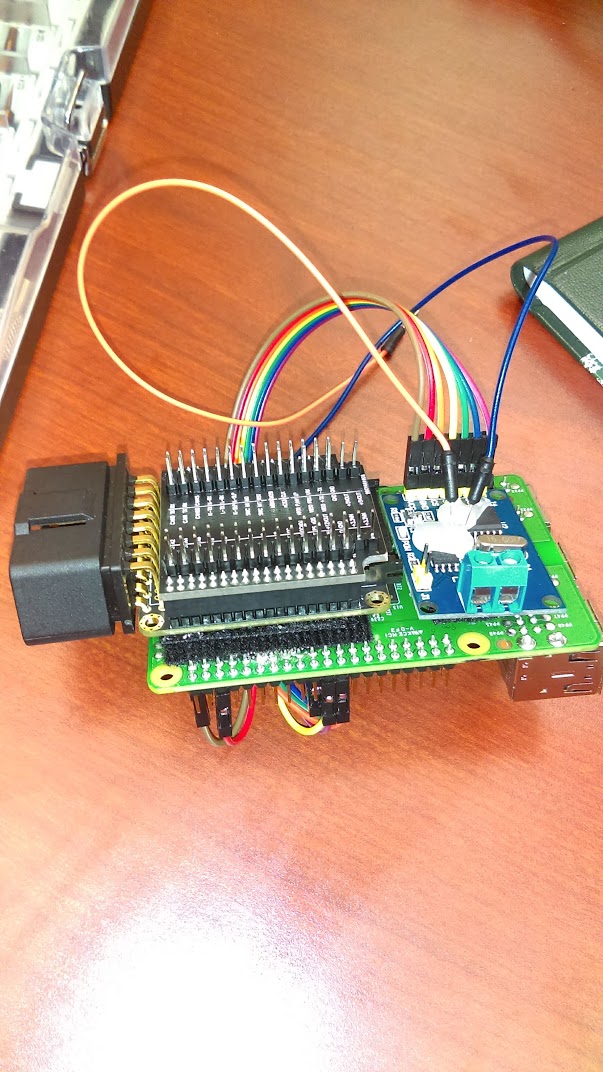
I purchased a breakout board and MCP2515 w/ TJA1050 transceiver from Ebay. I plan to cut the lead on the transceiver and wire my rx & tx directly to the M2-Breakout. Has anyone tried this? How were your results?
I want to use the Pi to write the CAN data either over-network or directly to an SD card. I do not have to use a Raspberry Pi for this project but have 2 available – Python is the largest necessity due to legacy applications. I’m more than happy to hear inputs and share my experience working through this!