
Hey,
I have problems configuring SWCAN on P1. I could set up the GPIO in the /boot/uEnv file, and it works. Now I want to set P2_06 and P2_18 pins to HIGH, to listen the SWCAN bus on a GM car.
I tried to configure the pins with the embedded command:
config-pin P2_18 hi
But I got error:
config-pin P2_18 hi ERROR: open() for /sys/devices/platform/ocp/ocp:P2_18_pinmux/state failed, No such file or directory
Basically, I dont have that pinmux file there:
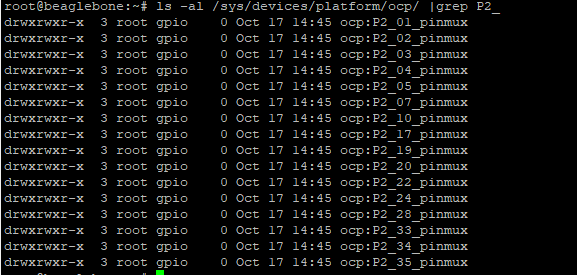
I looked after that GPIO library, thinking maybe that is the problem, but not, it is correctly loaded:
> /opt/scripts/tools/version.sh
git:/opt/scripts/:[7cdc270818b76d829d247cf05fe309c320a3929a] eeprom:[A335PBGL00A21743GPB30299] model:[TI_AM335x_PocketBeagle] dogtag:[BeagleBoard.org Debian Buster IoT Image 2020-08-25] bootloader:[microSD]:[/dev/mmcblk0]:[U-Boot 2019.04-00002-gc9b3922522]:[location: dd MBR] UBOOT: Booted Device-Tree:[am335x-pocketbeagle.dts] UBOOT: Loaded Overlay:[AM335X-PRU-RPROC-4-19-TI-00A0] UBOOT: Loaded Overlay:[BB-ADC-00A0] UBOOT: Loaded Overlay:[PB-CAN0-00A0] UBOOT: Loaded Overlay:[PB-CAN1-00A0] UBOOT: Loaded Overlay:[PB-MCP2515-SPI1] kernel:[4.19.94-ti-r50] nodejs:[v10.21.0] /boot/uEnv.txt Settings: uboot_overlay_options:[enable_uboot_overlays=1] uboot_overlay_options:[uboot_overlay_addr4=/lib/firmware/PB-CAN0-00A0.dtbo] uboot_overlay_options:[uboot_overlay_addr5=/lib/firmware/PB-CAN1-00A0.dtbo] uboot_overlay_options:[uboot_overlay_addr6=/lib/firmware/PB-MCP2515-SPI1.dtbo] uboot_overlay_options:[uboot_overlay_pru=AM335X-PRU-RPROC-4-19-TI-00A0.dtbo] uboot_overlay_options:[enable_uboot_cape_universal=1] pkg check: to individually upgrade run: [sudo apt install --only-upgrade <pkg>] pkg:[bb-cape-overlays]:[4.14.20200814.0-0~buster+20200814] pkg:[bb-wl18xx-firmware]:[1.20200813.1-0~buster+20200813] pkg:[kmod]:[26-1] pkg:[librobotcontrol]:[1.0.5-git20200715.0-0~buster+20200716] pkg:[firmware-ti-connectivity]:[20190717-2rcnee1~buster+20200305] groups:[debian : debian adm kmem dialout cdrom floppy audio dip video plugdev users systemd-journal input bluetooth netdev i2c gpio admin spi iio docker tisdk weston-launch xenomai cloud9ide pwm eqep remoteproc] cmdline:[console=ttyO0,115200n8 root=/dev/mmcblk0p1 ro rootfstype=ext4 rootwait coherent_pool=1M net.ifnames=0 lpj=1990656 rng_core.default_quality=100 quiet] dmesg | grep remote [ 53.832040] remoteproc remoteproc0: wkup_m3 is available [ 54.008667] remoteproc remoteproc0: powering up wkup_m3 [ 54.008700] remoteproc remoteproc0: Booting fw image am335x-pm-firmware.elf, size 217168 [ 54.008997] remoteproc remoteproc0: remote processor wkup_m3 is now up [ 55.838857] remoteproc remoteproc1: 4a334000.pru is available [ 55.872421] remoteproc remoteproc2: 4a338000.pru is available dmesg | grep pru [ 55.838857] remoteproc remoteproc1: 4a334000.pru is available [ 55.839046] pru-rproc 4a334000.pru: PRU rproc node pru@4a334000 probed successfully [ 55.872421] remoteproc remoteproc2: 4a338000.pru is available [ 55.872630] pru-rproc 4a338000.pru: PRU rproc node pru@4a338000 probed successfully dmesg | grep pinctrl-single [ 0.895597] pinctrl-single 44e10800.pinmux: 142 pins, size 568 dmesg | grep gpio-of-helper [ 0.905153] gpio-of-helper ocp:cape-universal: ready lsusb Bus 002 Device 002: ID 148f:7601 Ralink Technology, Corp. MT7601U Wireless Adapter Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub END
I tried to run pinmux-generator, to generate that P2_06 and P2_18 pinmux file, but it throws error:
root@beaglebone:/opt/source/bb.org-overlays/tools/pinmux-generator# ./PocketBeagle.sh
pinmux-4.0.1526-setup.run 100%[=====================================================================================================================================================================>] 39.87M 2.91MB/s in 14s
2020-10-17 15:20:15 (2.76 MB/s) - ‘pinmux-4.0.1526-setup.run’ saved [41810329/41810329]
./lib/pinmux.sh: line 220: ./pinmux-4.0.1526-setup.run: cannot execute binary file: Exec format error
cp: cannot stat 'tmp/pinmux/deviceData/AM335x/AM335x.json': No such file or directory
##################
P1_02
cat: AM335x.json: No such file or directory
cat: AM335x.json: No such file or directory
cat: AM335x.json: No such file or directory
cat: AM335x.json: No such file or directory
Tried to install pinmux manually, but it doesnt support armhf architecture.
Already contacted Macchina support about this, but no answer yet.
No documents available at the moment about setting up SWCAN.
What am I doing wrong?
